3. Hướng dẫn lập trình
Phần này hướng dẫn quy trình lập trình cho Robot ORC K2 Starter Kit (2025 - 2026), từ chuẩn bị phần mềm đến nạp chương trình và vận hành bằng Gamepad.
1. Chuẩn bị phần mềm
- Truy cập app.ohstem.vn và chọn thiết bị Yolo UNO.
- Vào chế độ Lập trình.
- Kết nối
ORC Control Hubvới máy tính qua cáp USB. - Chọn đúng cổng kết nối có tên gần giống Espressif CDC Device.
- Vào mục Mở rộng, tìm và cài thư viện ROBOTICS.
2. Thiết lập mã nguồn
- Cấu hình robot với các thông số cơ bản:
- đường kính bánh xe
60 mm - tỉ số truyền
1:34 - encoder
350 ppr
- đường kính bánh xe
- Thiết lập giới hạn góc cho servo
S1vàS2để tránh kẹt cơ cấu đẩy trong quá trình vận hành. - Kiểm tra lại cổng kết nối trước khi nạp chương trình:
- bánh xe trái:
M1 / E1 - bánh xe phải:
M2 / E2 - cơ cấu nâng hạ:
M4 - cơ cấu cuộn bóng:
M3 - servo càng đẩy:
S1,S2 - Gamepad Receiver:
I2C 3
- bánh xe trái:
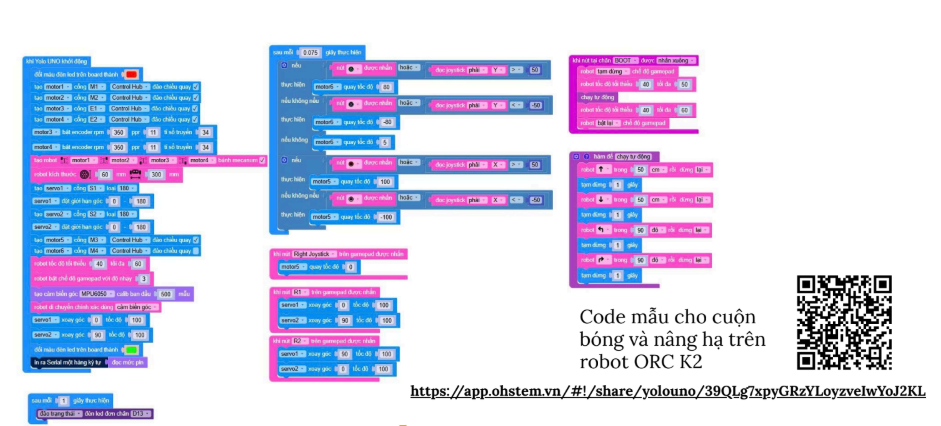
3. Chương trình mẫu cho robot ORC K2
- Chương trình mẫu dưới đây áp dụng cho ORC K2 dùng động cơ xanh - đen.
- Link code mẫu: Mở chương trình trên OhStem App
- Cấu hình mẫu sử dụng đúng sơ đồ nối dây:
- bánh trái:
M1 / E1 - bánh phải:
M2 / E2 - cơ cấu cuộn bóng:
M3 - cơ cấu nâng hạ:
M4 - servo càng đẩy:
S1,S2 - Gamepad Receiver:
I2C 3
- bánh trái:
- Khi chạy thử:
- joystick dùng để điều khiển di chuyển robot
L1 / L2dùng để nâng hoặc hạ cơ cấuR1 / R2dùng để mở hoặc gập càng đẩy
- Nếu bạn đang dùng phiên bản động cơ
GA25, cần kiểm tra lại chiều quay, tốc độ và tham số động cơ trước khi dùng chương trình này.
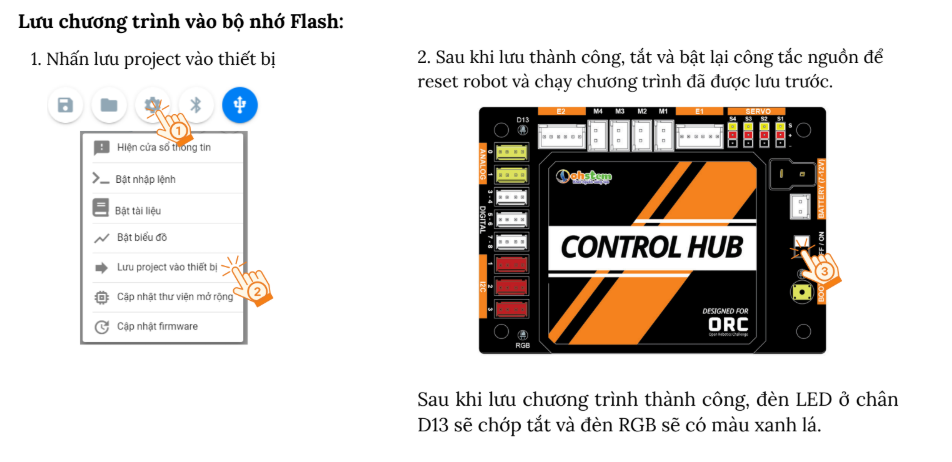
4. Nạp chương trình và xác nhận hoạt động
- Nhấn biểu tượng Lưu project vào thiết bị để ghi chương trình vào bộ nhớ Flash của Control Hub.
- Sau khi nạp thành công, đèn LED tại chân
D13sẽ chớp tắt định kỳ. - Nếu chương trình không chạy đúng, hãy kiểm tra lại cổng kết nối và tham số cấu hình robot.
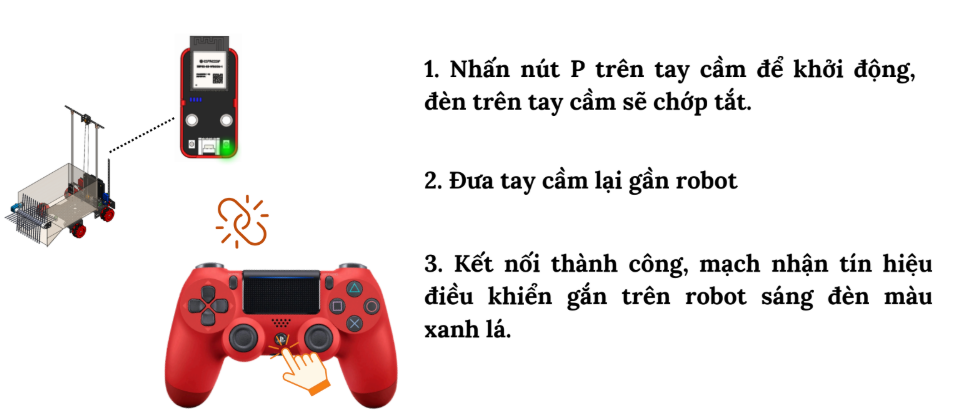
5. Điều khiển robot bằng Gamepad
- Nhấn nút
Pđể khởi động tay cầm. L1 / L2: nâng hoặc hạ cơ cấu.R1 / R2: mở hoặc gập càng đẩy.- Joystick: điều khiển robot di chuyển.

6. Gợi ý kiểm tra khi chạy thử
- Nếu robot di chuyển không đúng hướng, hãy kiểm tra lại chiều lắp bánh Mecanum và mapping động cơ.
- Nếu cơ cấu đẩy bị kẹt, hãy giảm giới hạn góc của servo
S1vàS2. - Nếu Gamepad không nhận, hãy kiểm tra lại dây kết nối
I2C 3và nguồn cấp cho mạch. - Nên thử robot ở trạng thái không tải trước khi đưa vào vận hành với bóng hoặc vật thể thật.
7. Tham khảo thêm
- Nếu bạn cần hướng dẫn chi tiết hơn về cập nhật firmware, kết nối phần mềm hoặc các bài tập nền tảng với ORC Control Hub, có thể xem tại: Làm quen với Control Hub
Last updated on
