2. Hướng dẫn lắp ráp
Trang này tổng hợp lộ trình lắp ráp Robot ORC K3 theo các cụm cơ khí chính và sơ đồ nối dây cơ bản.
Tài liệu lắp ráp
- Tài liệu hướng dẫn ORC K3: Xem tài liệu
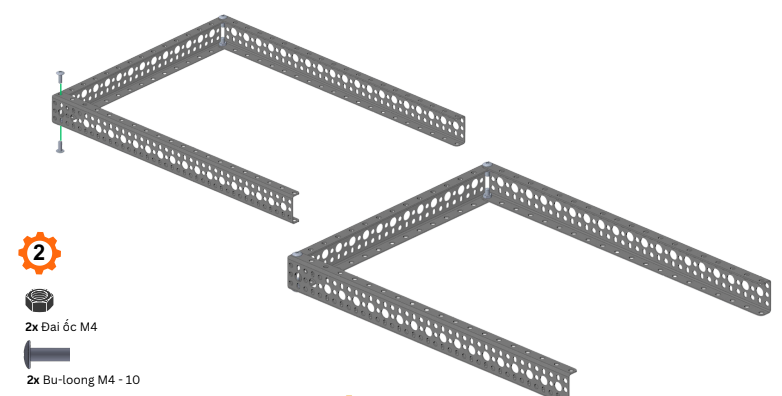
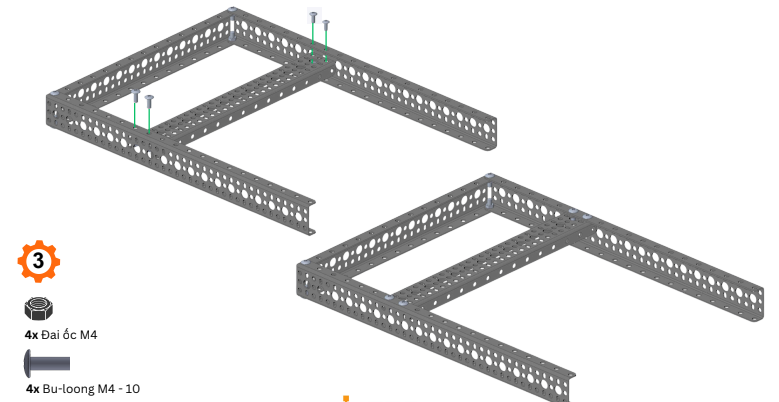
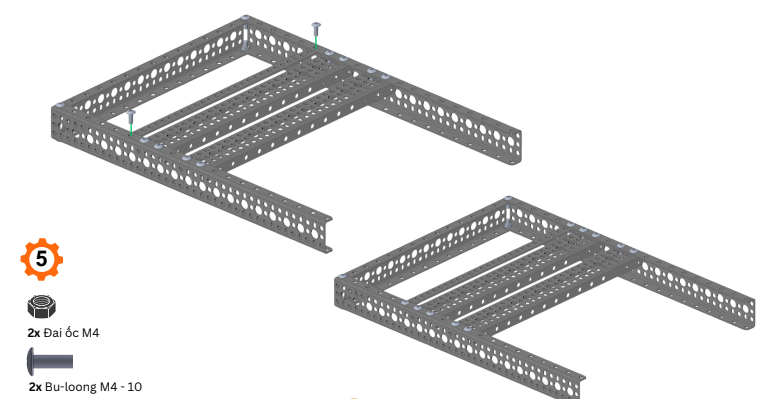
1. Lắp khung sàn robot
- Ghép các thanh beam để tạo khung đáy cho ORC K3.
- Dùng bu-lông
M4-10và đai ốcM4để cố định các thanh ngang. - Kiểm tra hai cạnh khung song song trước khi lắp tiếp động cơ và bánh xe.
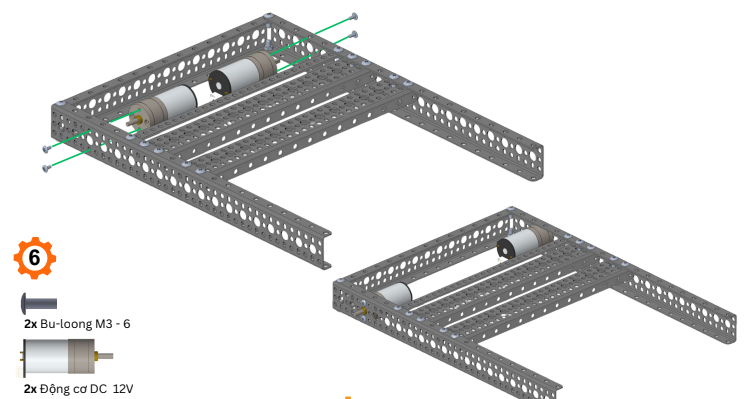
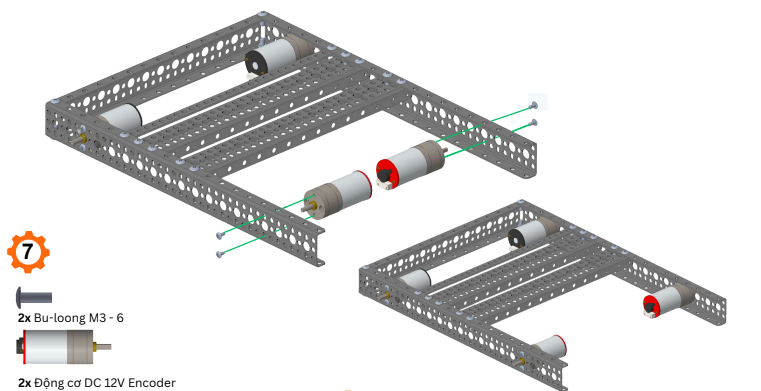
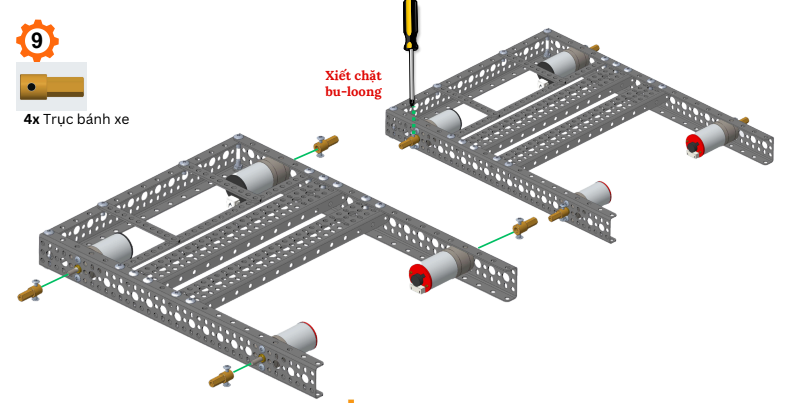
2. Lắp động cơ và bánh Mecanum
- Lắp 2 động cơ DC 12V và 2 động cơ DC 12V encoder lên khung.
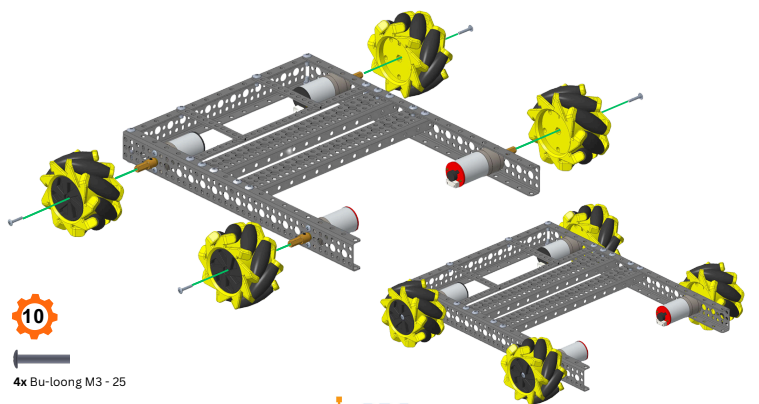
- Gắn 4 trục bánh xe rồi lắp 4 bánh Mecanum vào đúng vị trí.
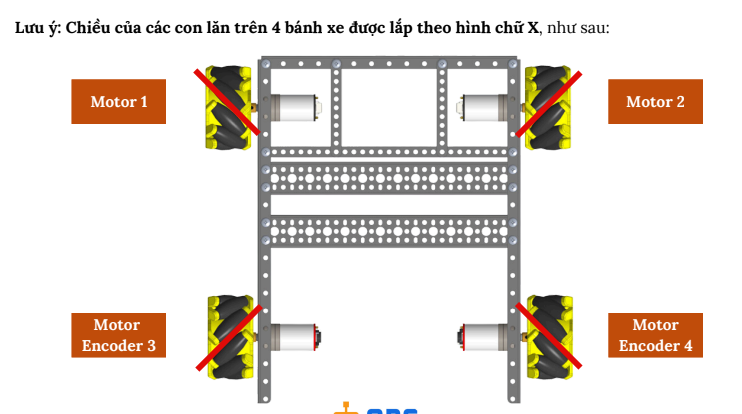
- Lưu ý: chiều của các con lăn trên 4 bánh phải tạo thành hình chữ X khi nhìn từ trên xuống.
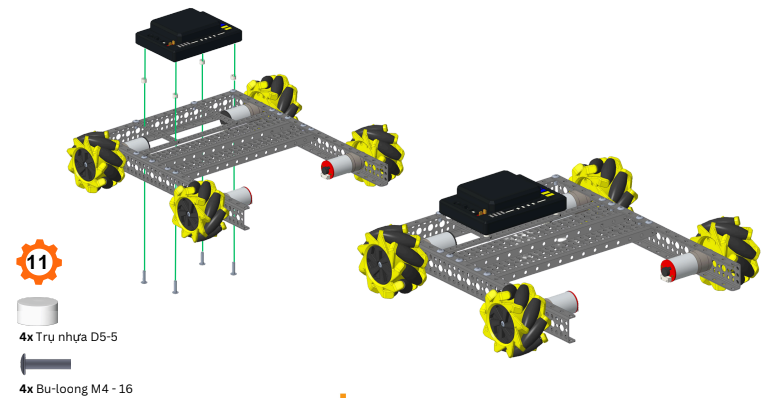
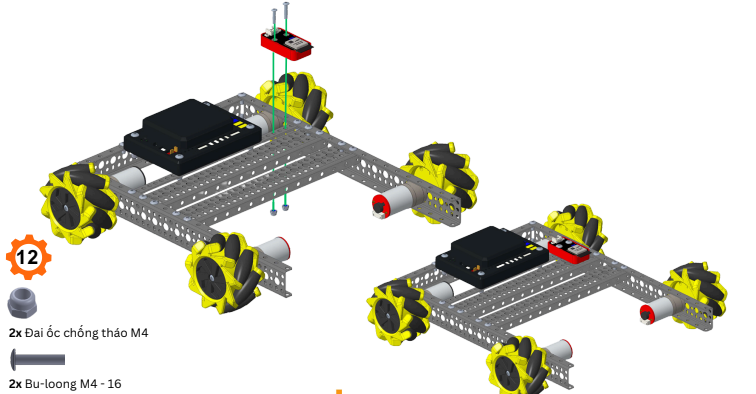
3. Lắp ORC Control Hub và Gamepad Receiver
- Gắn
ORC Control Hublên mặt sàn bằng các trụ nhựa. - Gắn
Gamepad Receiverlên vị trí trên khung để tiện kết nối và quan sát đèn báo. - Kiểm tra khoảng hở dây trước khi nối điện và cấp nguồn.
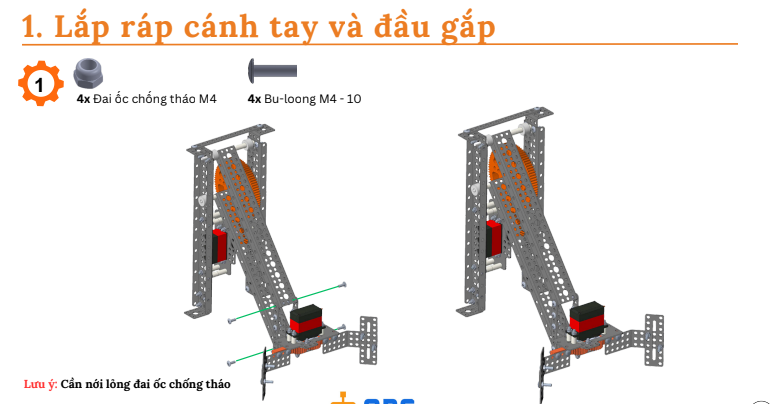
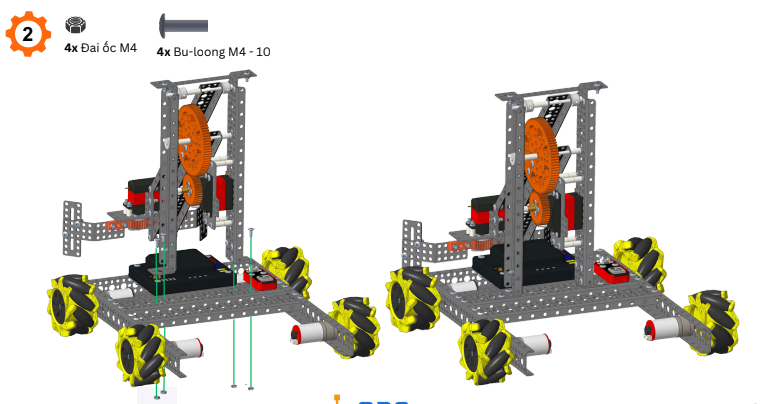
4. Lắp cánh tay và đầu gắp
- Lắp cụm cánh tay và đầu gắp theo cụm riêng trước khi gắn lên thân robot.
- Khi gắn lên thân robot, kiểm tra lại hành trình nâng hạ và góc mở của đầu gắp.
- Siết chặt các đai ốc chống tháo ở vị trí chịu lực của cụm cánh tay.
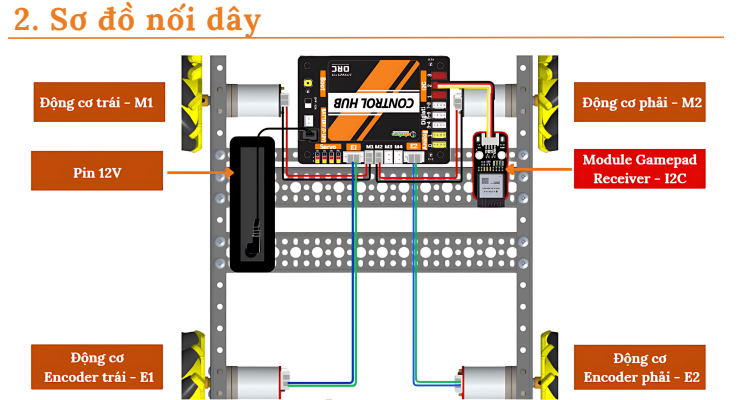
5. Sơ đồ nối dây với ORC Control Hub
- Động cơ trái:
M1 - Động cơ phải:
M2 - Encoder trái:
E1 - Encoder phải:
E2 - Gamepad Receiver:
I2C - Nguồn pin:
12V
6. Kiểm tra trước khi cấp nguồn
- Kiểm tra lại chiều lắp của 4 bánh Mecanum.
- Siết chặt bu-lông ở khung, trục bánh, cụm cánh tay và giá đỡ mạch.
- Đảm bảo dây động cơ, dây encoder, dây nguồn và dây I2C được cắm đúng cổng.
- Thử chuyển động tay bằng tay để chắc chắn cơ cấu không bị kẹt.
Last updated on
