2. Hướng dẫn lập trình
Phần này hướng dẫn quy trình lập trình cho Rover ORC Junior theo đúng các bước minh họa trong tài liệu: vào OhStem App, kết nối robot, tải thư viện, mở chương trình mẫu và lưu chương trình vào robot.
- Tài liệu tổng hợp: Rover ORC Junior 2025 - 2026
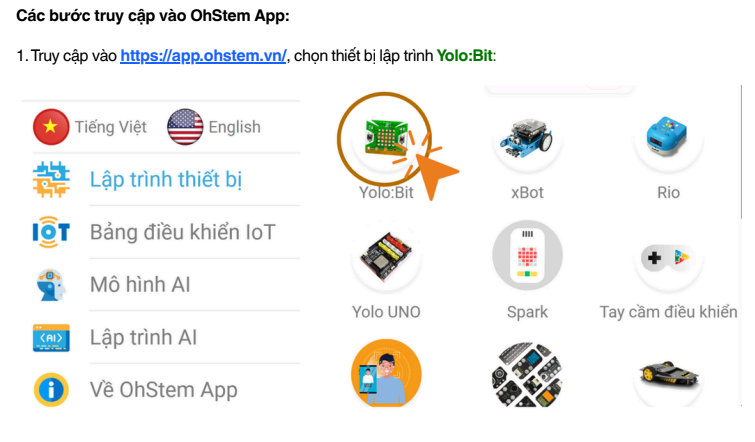
1. Truy cập OhStem App
- Truy cập app.ohstem.vn .
- Chọn thiết bị lập trình Yolo:Bit.
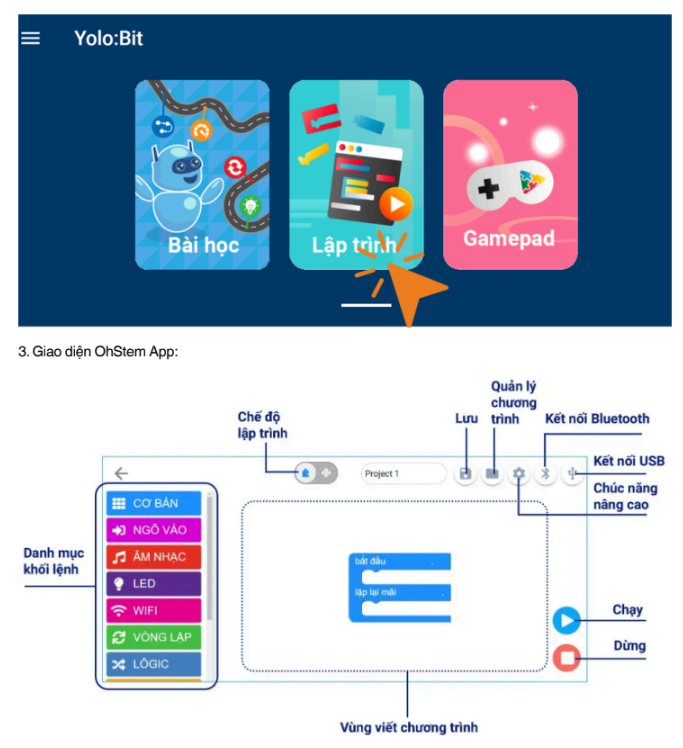
- Trong giao diện của Yolo:Bit, chọn chế độ Lập trình.
2. Kết nối Rover với máy tính
- Kết nối Yolo:Bit trên Rover với máy tính bằng cáp USB.
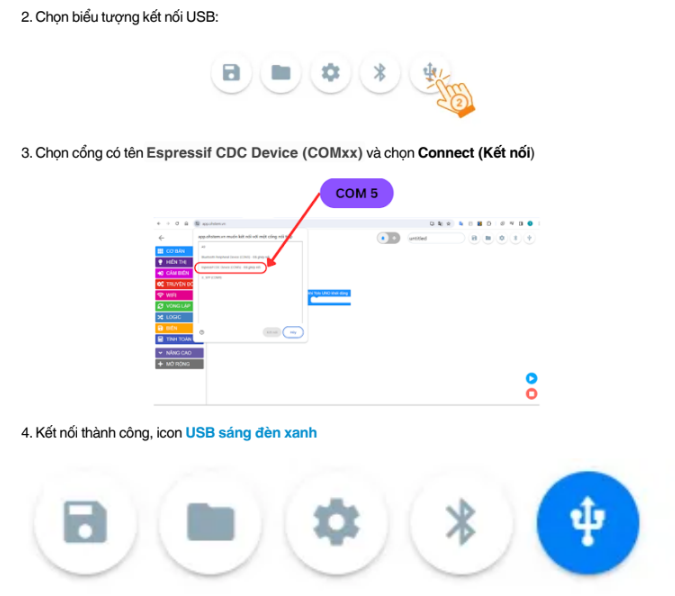
- Trong thanh công cụ, chọn biểu tượng kết nối USB.
- Chọn đúng cổng có tên gần giống Espressif CDC Device (COMxx) rồi nhấn Connect.
- Khi kết nối thành công, biểu tượng USB sẽ sáng màu xanh.

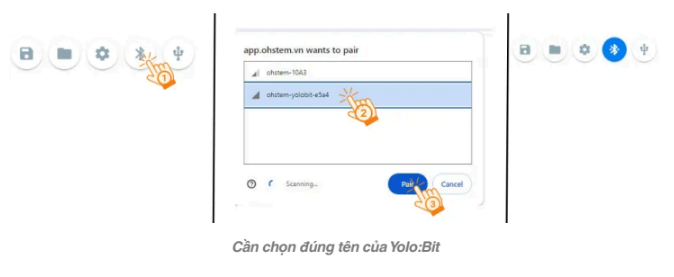
- Nếu cần kết nối không dây, bạn có thể dùng Bluetooth và chọn đúng tên của Yolo:Bit trước khi ghép nối.
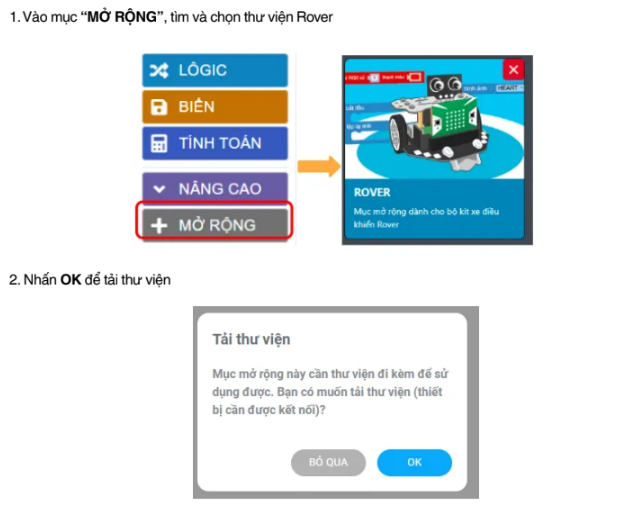
3. Tải các thư viện cần dùng
- Vào mục Mở rộng.
- Tìm và cài thư viện Rover.
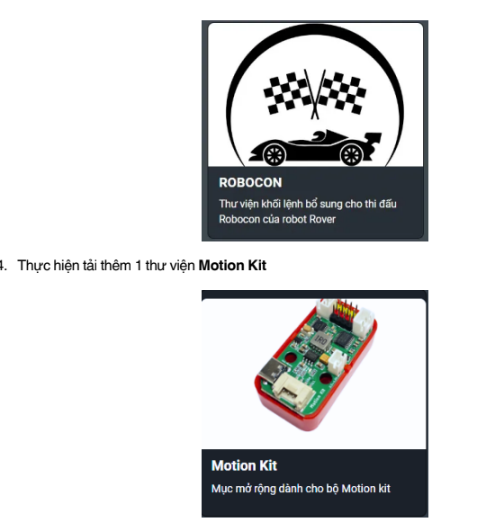
- Tiếp tục tải thêm thư viện ROBOCON và Motion Kit để dùng cho robot thi đấu và các cơ cấu mở rộng.
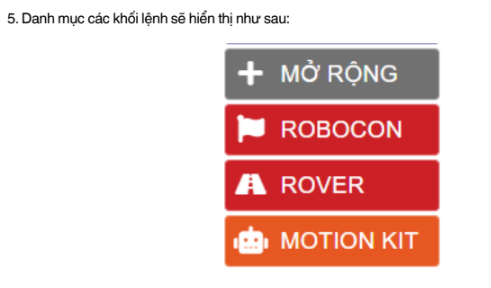
- Sau khi cài xong, danh mục khối lệnh sẽ xuất hiện các nhóm ROBOCON, ROVER và MOTION KIT.
4. Căn chỉnh cảm biến dò line
- Trước khi chạy các bài bám line hoặc thi đấu trên sa bàn, bạn nên căn chỉnh cảm biến dò line để Rover nhận đúng nền trắng và vạch đen.
- Bật nguồn robot, đặt cụm cảm biến lần lượt trên nền trắng và trên vạch đen để quan sát 4 đèn báo cảm biến.
- Nếu cảm biến nhận chưa ổn định, hãy dùng tua vít nhỏ để chỉnh biến trở trên cụm cảm biến theo video hướng dẫn bên dưới.
- Video hướng dẫn: Chỉnh cảm biến dò line cho robot Rover
Lưu ý: Nếu robot chỉ chạy thẳng hoặc không bám được line, hãy chỉnh cảm biến trước khi sửa chương trình.
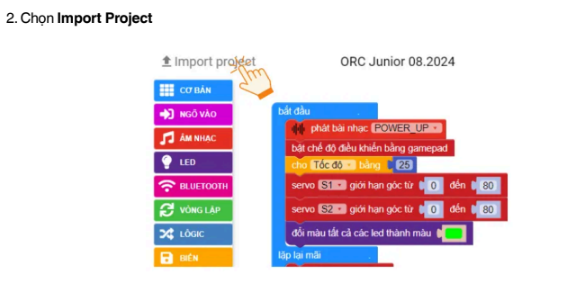
5. Mở chương trình mẫu
- Link code mẫu: Mở chương trình Rover ORC Junior trên OhStem App
- Chương trình mẫu đã có sẵn các thiết lập cơ bản cho robot như:
- bật chế độ điều khiển bằng gamepad
- đặt tốc độ mặc định
- giới hạn góc servo
S1vàS2 - thiết lập hiệu ứng LED khởi động
- Nếu bạn có file project riêng lưu trong máy, có thể dùng chức năng Import Project để nạp vào OhStem App.
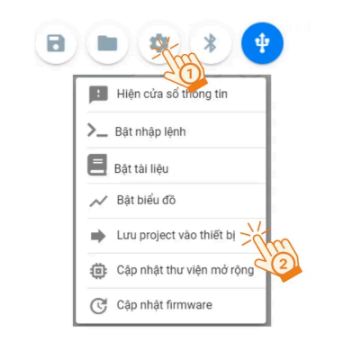
6. Lưu chương trình vào robot
- Sau khi kiểm tra xong chương trình, mở menu công cụ và chọn Lưu project vào thiết bị.
- Khi lưu thành công, chương trình sẽ được ghi vào bộ nhớ Flash của robot.
- Tắt nguồn rồi bật lại robot để chương trình tự chạy khi khởi động.

7. Chạy thử nhanh
- Nếu chỉ muốn thử nhanh mà chưa lưu vào bộ nhớ, bạn có thể nhấn nút Chạy chương trình trực tiếp trên OhStem App.
- Khi cần dừng, nhấn Dừng chương trình.
- Nếu robot chưa phản hồi đúng, hãy kiểm tra lại cáp USB, thư viện đã cài, trạng thái kết nối và bước căn chỉnh cảm biến dò line.
Last updated on
