2. Động cơ Servo SG90S

-
Động cơ Servo SG90S có thể được điều khiển và ứng dụng vào các dự án như lái robot, di chuyển các khớp cánh tay robot lên xuống,…
-
Sản phẩm có 2 loại: động cơ xoay được 180 độ và động cơ xoay được 360 độ.
1. Mua sản phẩm

2. Kết nối
- Bước 1: Chuẩn bị các thiết bị như sau:
| Hình ảnh | Sản phẩm | Mua hàng |
|---|---|---|
 | Máy tính lập trình Yolo:Bit | Mua sản phẩm |
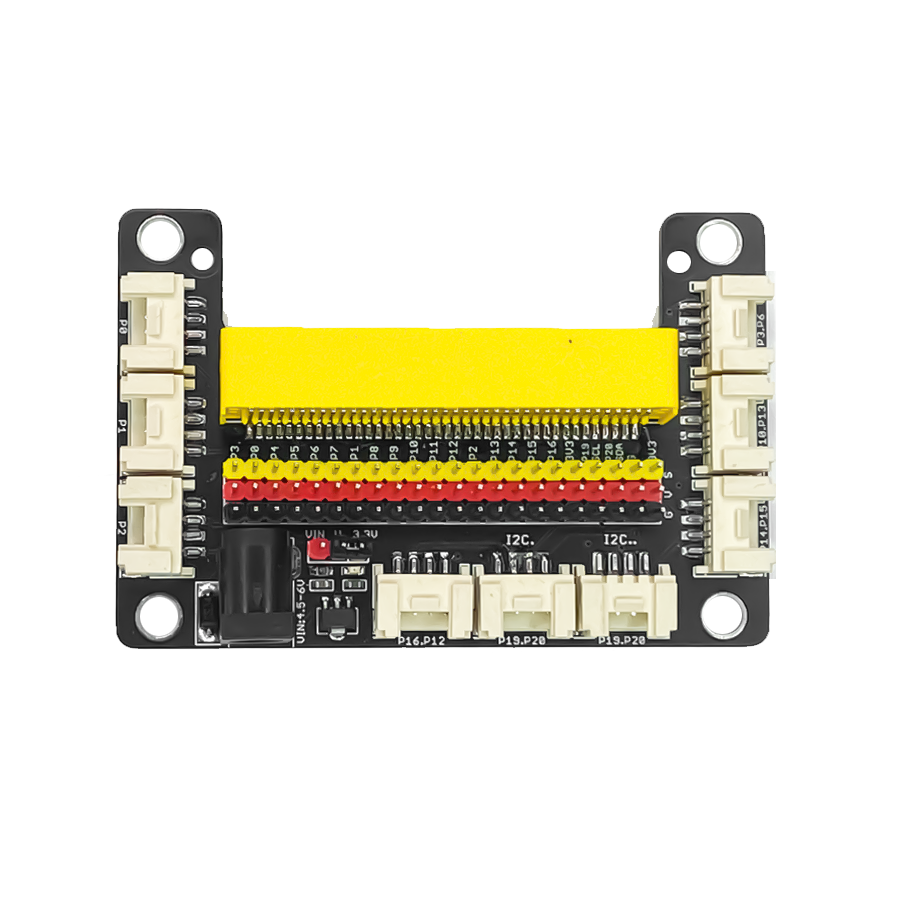 | Mạch mở rộng cho Yolo:Bit | Mua sản phẩm |
 | Động cơ Servo SG90S | Mua sản phẩm |
-
Bước 2: Cắm Yolo:Bit vào mạch mở rộng
-
Bước 3: Kết nối thiết bị vào chân P4 trên mạch mở rộng

3. Hướng dẫn lập trình với OhStem App
-
Đối với động cơ servo 180 độ:
- Sử dụng khối lệnh sau trong danh mục CHÂN CẮM, để điều khiển:

|
-
Trước khi lập trình, bạn cần xác định vị trí góc của servo để việc lập trình thuận lợi hơn.
-
Gửi chương trình sau xuống Yolo:Bit, để kiểm tra hoạt động của servo:

|
- Sử dụng khối lệnh sau trong danh mục CHÂN CẮM, để điều khiển:
Ghi chú: Khi sau khi xác định vị trí góc của servo, bằng câu lệnh trong khối bắt đầu. Bạn hãy nhấn nút để xem sự di chuyển của cánh servo.
-
Đối với động cơ servo 360 độ:
- Sử dụng khối lệnh sau trong danh mục CHÂN CẮM, để điều khiển:

|
-
Động cơ servo 360, sẽ có các chế độ hoạt động như sau:
- Tốc độ 0: Đứng yên
- Tốc độ 100: Tối đa
- Tốc độ -100 - 0: Động cơ quay ngược chiều kim đồng hồ
- Tốc độ 0- 100: Động cơ quay cùng chiều kim đồng hồ
-
Gửi chương trình sau xuống Yolo:Bit, để kiểm tra hoạt động của servo:

|
- Sử dụng khối lệnh sau trong danh mục CHÂN CẮM, để điều khiển:
Ghi chú: Chương trình được ứng dụng vào các dự án như sáng tạo bánh xe robot, ròng rọc của cáp treo…
5. Hướng dẫn lập trình Arduino
-
Mở phần mềm Arduino IDE. Xem hướng dẫn lập trình với Arduino tại đây .
-
Copy đoạn code sau, click vào nút
Verifyđể kiểm tra lỗi chương trình. Sau khi biên dịch không báo lỗi, bạn có thể nạp đoạn code vào board.
#include "YoloBit.h"
#include <Servo.h>
YoloBit yolobit;
// Điều khiển servo 180, quay liên tục từ góc 0 đến 180 độ và ngược lại.
Servo myservo;
int pos = 0; // lưu vị trí của servo
void setup() {
myservo.attach(P4); // kết nối servo vào chân P4
}
void loop() {
for (pos=0; pos<=180; pos++) { // từ 0 đến 180 độ
myservo.write(pos);
delay(15);
}
// Đảo ngược quá trình từ 180 đến 0 độ
for (pos=180; pos>=0; pos--) {
myservo.write(pos);
delay(15);
}
}-
Điều khiển Servo 180 độ:
-
Điều khiển Servo 360 độ:
#include <Servo.h>
#include “Yolobit.h”
Servo myservo;
Yolobit yolobit;
int pos = 0;
int Control_Pin = P4;
void setup() {
// Điều khiển servo qua chân P4 của Yolobit
myservo.attach(Control_Pin );
// Servo ở trạng thái đứng yên, ở góc 90 độ
myservo.write(90);
}
void loop() {
// Servo quay về vị trí tối đa ở góc 180 độ trong 1 giây
myservo.write(180);
delay(1000);
// Servo ở trạng thái đứng yên trong 1 giây
myservo.write(90);
delay(1000);
// Servo quay về vị trí tối đa ở góc 0 độ trong 1 giây
myservo.write(0);
delay(1000);
// Servo ở trạng thái đứng yên trong 1 giây
myservo.write(90);
delay(1000);
}